Examples
contour_boxplot_example
curve_boxplot_example
functional_boxplot_example
probabilistic_marching_cubes_example
probabilistic_marching_squares_example
probabilistic_marching_tet_example
probabilistic_marching_triangles_example
squid_glyphs_2D_example
squid_glyphs_3D_example
uncertainty_lobes_2D_example
uncertainty_tube_example
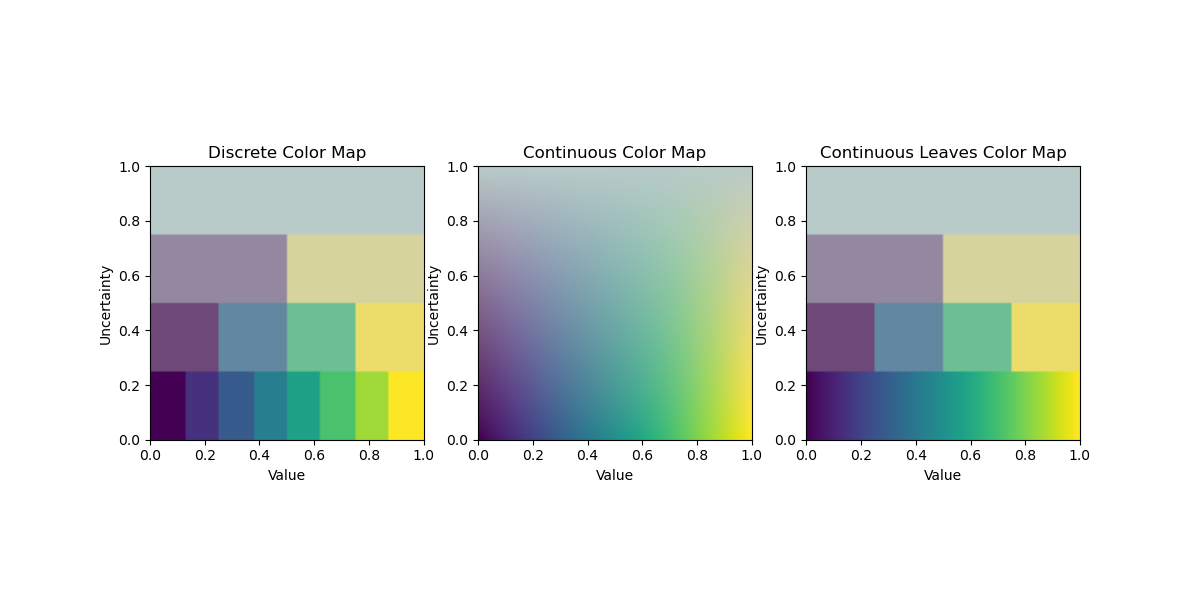
vsup_example
Example script demonstrating the ColorTree colormap for visualizing value and uncertainty. A ColorTree is inspired by VSUP (Value-Suppressing Uncertainty Palettes) and creates a tree-based colormap. Value is suppressed based on uncertainty, allowing for more effective visualization of uncertain data.
VSUP:https://medium.com/@uwdata/value-suppressing-uncertainty-palettes-426130122ce9
This script creates a sample 2D image where the x-axis represents value (0 to 1) and the y-axis represents uncertainty (0 to 1). It generates three visualizations: - Discrete: Uses tree nodes for discrete levels. - Continuous: Interpolates colormap colors with uncertainty. - Continuous Leaves: Uses colormap for leaf levels in discrete mode.
Run this script to see the differences between the modes.
Important necessary libraries
import numpy as np
import matplotlib.pyplot as plt
from uvisbox.Core.Colors.colortree import ColorTree
Set up the figure with three subplots
fig, ax = plt.subplots(1, 3, figsize=(12, 6))
Create a sample image where x (columns) is value (0 to 1), y (rows) is uncertainty (0 to 1)
height, width = 100, 100
value_grid = np.linspace(0, 1, width)[None, :] # Shape (1, 100), broadcasted to (100, 100)
uncertainty_grid = np.linspace(0, 1, height)[:, None] # Shape (100, 1), broadcasted to (100, 100)
# Create image array with shape (100, 100, 2) where last dim is [uncertainty, value]
image = np.stack([uncertainty_grid * np.ones((height, width)), value_grid * np.ones((height, width))], axis=-1)
# Initialize ColorTree with depth=4 and default settings
colormap = ColorTree(depth=4, cmap="viridis")
# Generate colors for discrete mode (uses tree nodes)
colors = colormap.get_colors(image, discrete=True)
# Plot the discrete color map
ax[0].imshow(colors, origin='lower', extent=(0, 1, 0, 1))
ax[0].set_title("Discrete Color Map")
ax[0].set_xlabel("Value")
ax[0].set_ylabel("Uncertainty")
# Generate colors for continuous mode (interpolates colormap with uncertainty)
continuous_color = colormap.get_colors(image, discrete=False)
# Plot the continuous color map
ax[1].imshow(continuous_color, origin='lower', extent=(0, 1, 0, 1))
ax[1].set_title("Continuous Color Map")
ax[1].set_xlabel("Value")
ax[1].set_ylabel("Uncertainty")
# Generate colors for continuous leaves mode (discrete with colormap at leaves)
continuous_leaves_color = colormap.get_colors(image, discrete=True, continuous_leaves=True)
# Plot the continuous leaves color map
ax[2].imshow(continuous_leaves_color, origin='lower', extent=(0, 1, 0, 1))
ax[2].set_title("Continuous Leaves Color Map")
ax[2].set_xlabel("Value")
ax[2].set_ylabel("Uncertainty")
# Display the plot
plt.show()